武科大网讯(通讯员曾宪森)近日,计算机科学与技术学院林云汉博士团队的研究成果LangGrasp: Leveraging Fine-Tuned LLMs for Language Interactive Robot Grasping with Ambiguous Instruction被IEEE/RSJ智能机器人与系统国际会议(IROS 2025)录用,林云汉博士为文章第一作者,我院硕士研究生吴文棋为第二作者,我校机器人与智能系统研究院院长闵华松教授为通讯作者。
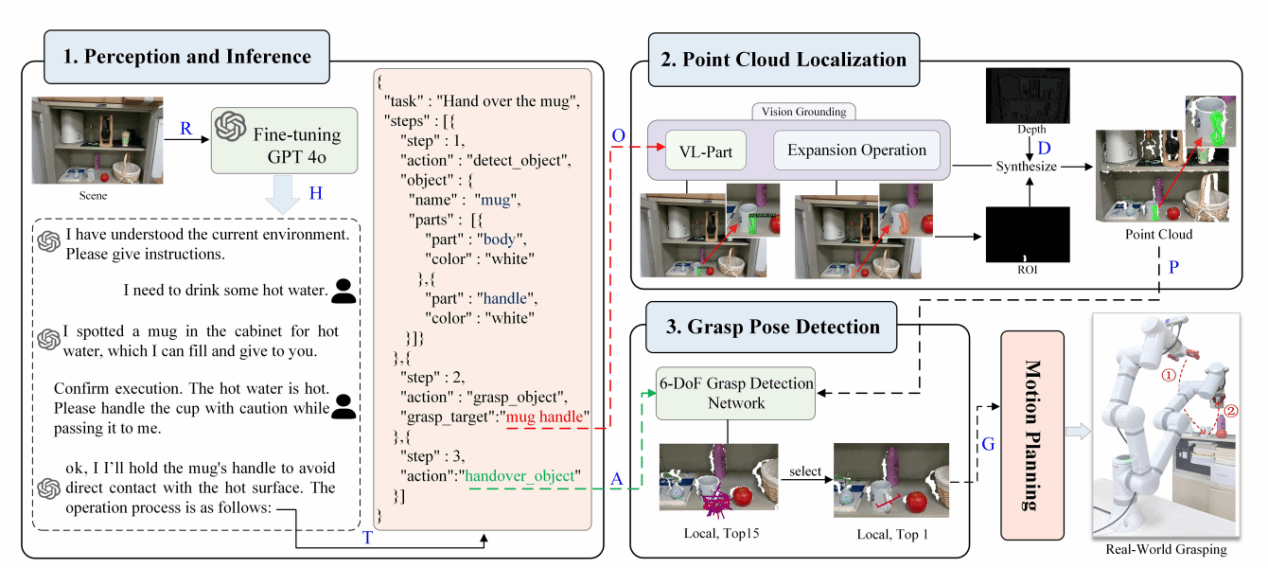
该论文提出了一种新的基于自然语言交互与大语言模型常识推理的机器人抓取框架LangGrasp。该框架集成了微调的大型语言模型(LLMs),以利用其强大的常识理解和环境感知能力,从而从语言指令中推断隐含意图,并澄清任务需求以及目标操作对象。此外,设计的点云定位模块,在二维部件分割的指导下,实现了场景中的部分点云定位,从而将抓取操作从粗粒度的对象级扩展到细粒度的零件级操作,显著提高了目标物体六自由度抓取姿态的质量和精度。
IEEE/RSJ 智能机器人与系统国际会议(IROS)自 1988 年创办以来,已成为全球机器人与智能系统领域的顶级学术平台之一。历届会议汇聚全球顶尖专家学者,推动机器人技术与智能系统的创新与发展。2025 年,IROS 将时隔 20 年再次回到中国,在历史文化名城与科技创新高地——杭州举办。
据悉,本届会议的主题为 “人类-机器人前沿”,聚焦于人工智能和机器人技术的突破性进展,探索人机协作、智能系统以及机器人应用的最新前沿。会议期间,将举办主题报告、论文展示、专题研讨、行业论坛、机器人展览、技术参观等多种活动,为全球机器人学者和从业者提供一个高水平的学术交流和合作平台。